Fail2Ban IP entsperren
Man kennt es, man hasst es. Passwort vergessen und man probiert sich durch oder gar vertippt und schon ist man vom Server oder Raspberry Pi ,durch Fail2Ban, ausgesperrt . Dann stellt sich die Frage: “Was mach ich nun?”. Wir könnten warten bis die Sperrzeit aufgehoben wurde und unsere IP Adresse wieder frei ist oder wir loggen uns von einer anderen IP Adresse ein und entsperren uns. Im Folgenden führe ich zwei Beispiele auf. Die Entsperrung via IPTables ist nur vollständigkeitshalber und sollte nicht favorisiert benutzt werden, da dies zu Problemen mit Fail2Ban führen kann.
Im folgenden Beispiel, wurde ich via SSH ausgesperrt und logge mich nun mit Laptop und Surfstick neu zum entsperren ein.
Debian / Raspbian upgraden
Irgendwann einmal kommt der Tag wo, man seinen Rechner upgraden muss, obs nun ein Server im Netz oder ein Raspberry Pi ist. In erster Linie bereiten wir unser System vor und bringen ihn auf aktuellen Stand.
1 | sudo apt-get update && sudo apt-get upgrade |
Raspberry Pi Pico vorgestellt
Die Raspberry Pi Foundation brachte eine Steckbrett Platine mit selbst entwickeltem Mikrocontroller heraus und greift damit im Bereich des Arduino Nano an.
Für die einfachsten Projekte ist der Raspberry Pi einfach zu teuer, zu gr0ß und zu stromdurstig. Nun gibt es den Raspberry Pi Pico, um sich genau in diesen Bereichen zu verbessern, der in der Klasse vom Arduino Nano spielt. Er ist mit seiner Größe von 5,1cm x 2,1cm minimal größer als sein Konkurrent, hat aber auch 40 statt 30 Kontaktstifte und 26 statt 22 GPIOs, letztere arbeiten mit 3,3Volt.
Begrüßungstext in Linux ändern
Man kennt es, auf einem Server oder Raspberry PI eingeloggt und man stellt sich die Frage wo man sich befindet, da nur die IP Adresse angezeigt wird, weil man noch keinen Hostnamen hat, der eventuell die Maschine bzw den Ort genauer defeniert. Grad beim Raspi. als Bastlerrechner, wo man schnell mal ein paar in der Wohnung verteilt hat, können schon mal Fragezeichen entstehen.
Da ist eine schöne Begrüßung, via motd, mit einem individuellen Text doch etwas schönes. Mit der folgenden Anleitung können wir die motd ändern. motd steht hierbei für Message of the Day. Mit folgendem Befehl können wir die motd bearbeiten. Wir beziehen uns hier vorwiegend auf Debian/Raspian (Raspberry Pi OS)
Max Payne 2 startet nicht unter Windows 10
Ich habe glaub in all den Jahren viel gesehen, bzw erlebt, doch so eine Fehlerbehebung, wie bei Max Payne 2 hatte ich noch nie. Aber mal langsam von vorne.
Ich hatte wiedermal so richtig Lust auf Max Payne 2: The Fall of Max Payne bei Steam gekauft, in voller Vorfreude installiert, gestartet und es passierte nix! Im Taskmanager war es aktiv, aber nicht spielbar. Schnell DuckDuckGo angeworfen.
Das Spiel im Kompatibilitätsmodus auf Windows XP (Service Pack 2) mit einer Bildschirmauflösung von 640x480 umgestellt, so war die Empfehlung diverser Foren.
Login via SSH Key
Nach dem wir uns nun schnell einloggen können, wie im Artikel “schneller SSH Login“ beschrieben, müssen wir weiterhin noch das Passwort eingeben. Dies können wir mit einem SSH Key auch außen vor lassen. Ein einfacher, schneller und sicherer Login.
1 | ssh-keygen -t rsa -b 4096 |
schneller SSH Login
Vieles tut man sich heute vereinfachen und das in jeder Lage des Lebens. Deswegen zeig ich euch heute, wie ihr euch mit zwei Wörtern direkt auf eure Server verbinden könnt. Inzwischen gibt’s eine Fülle an Möglichkeiten, sei es Putty, Windows Powershell oder mein Favorit WSL (Windows Subsystems für Linux). Mit WSL habt ihr die Möglichkeit, eine virtuelle Linux Maschine, auf euren Windows PC laufen zulassen, was vieles extrem einfacher macht. Wie ihr WSL installiert und einrichtet, erkläre ich euch hier. Viele loggen sich klassisch mit dem folgenden Befehl ein.
1 | ssh pi@192.168.178.101 -p 22 |
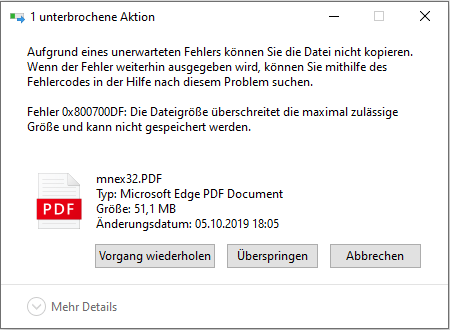
Fehler 0x800700DF
Wir haben via WebDAV unsere Cloud oder Storagebox z.B. von hetzner.de eingebunden, als eine Netzwerkfestplatte und wollen dann große Daten von der Platte laden. Was mit der folgenden Fehlermeldung abgebrochen wird.
Dateien packen und entpacken in Linux – Komplette Anleitung
- Übersicht: Dateien packen und entpacken in Linux
- Was sind Archive und warum sind sie wichtig?
- Warum verschiedene Archivformate verwenden?
- tar - Das Basis-Archivformat
- gzip (.gz) - Schnelle Kompression
- bzip2 (.bz2) - Bessere Kompression
- ZIP - Universelle Kompatibilität
- Vergleich der Formate
- Tipps
- Fazit